
深海超级助手——探秘水下机械手
上天、入地、下海、登极,是人类探索世界的四大梦想。其中,“下海”是指借助潜水器、自主航行器等装置对深海地质结构、矿产资源等进行探测,推动深海资源开发与海洋科学研究。作为上述装置的关键部件,水下机械手功能丰富,适应性强,可在极端恶劣条件下完成复杂任务,是人类探索深海的超级助手。
一、组成与特点
水下机械手通过一系列的关节和传动装置实现灵活运行,通常由机械臂主体、控制系统、通信系统和电源等部分组成。常见的驱动方式有电动驱动和液压驱动,电动驱动具有结构简单、控制精度高等特点,适用于小型无人遥控潜水器。而液压驱动输出力大、响应速度快,主要应用于大型无人遥控潜水器和载人潜水器。
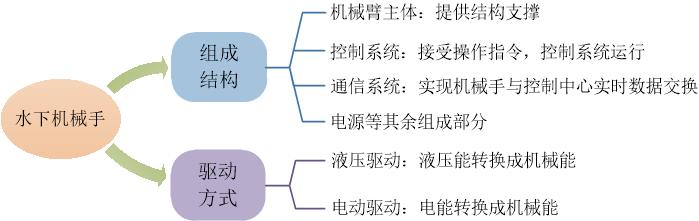 |
图 1 水下机械手组成结构及驱动方式分类
 |
图 2 机械手实体图(图片来源于视觉中国网站)
为了适应复杂恶劣的水下环境,机械手在结构设计上具有很多独特之处。首先需要具有良好的防水性能,采用密封材料和工艺处理各部件,有效防止海水入侵,保证内部元件正常运行。其次需要具备足够的强度和耐腐蚀性,通常采用高强度、耐腐蚀的合金材料来抵抗海水腐蚀,保证可靠性。此外,对关节进行灵活性设计,采用高精度的旋转、伸缩结构,实现自由弯曲、伸展等复杂动作。
二、应用领域
作为超级助手,水下机械手在众多领域承担着关键使命。
在资源勘探领域,水下机械手发挥着至关重要的作用。它可精准采集海底矿物和生物样本,为研究海洋地质、生态环境等提供宝贵的实物材料。
海洋工程建设离不开水下机械手的支持。它承担着海底油气管道铺设、连接,水下设备的安装、调试、维护等工作,大大提高了作业效率和安全性。
水下机械手可用于应急搜索和救援工作。它能进入狭小空间,快速定位并处理突发情况,给救援行动提供关键信息,为生命安全和财产保护提供有力保障。
在生态保护领域,水下机械手也有较大贡献。它可灵活抓取各种海洋垃圾,减少垃圾对海洋生物的威胁,保护海洋生态系统的完整性。
 |
图 3 机械手进行抓取实验(图片来源于广州海洋地质调查局网站)
 |
图 4 机械手进行搜寻工作(图片来源于广州日报)
三、挑战与突破
现如今,水下机械手已经在海洋领域取得了广泛应用,但仍面临一些挑战和突破。一方面,水下复杂多变的环境对机械手的控制精度和稳定性有了更高的要求;另一方面,物联网、大数据、云计算等先进技术的出现为构建水下机械手的“云大脑”创造了有利条件,人工智能的深度融合也将使水下机械手拥有自主决策的“直觉”和随机应变的“智慧”。
随着技术的不断突破,这一深海超级助手将继续推动人类对海洋的探索和开发。相信在不久的将来,水下机械手将发挥更为重要的作用,帮助人类解开更多海洋的神秘面纱,解锁海洋资源新图景。


 京公网安备 11010202007433号
京公网安备 11010202007433号